耐環境型 ネットワーク接続型変換器
製品概要
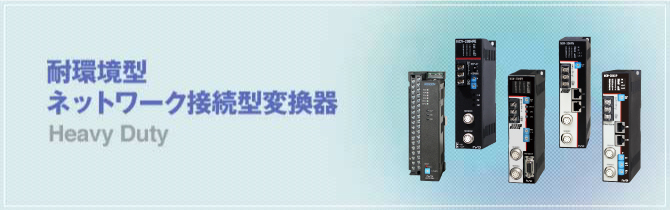
ネットワーク接続型変換器はエヌエスディの位置検出センサであるアブソコーダの変換部です。
アブソコーダ検出器と組み合わせることで位置情報を出力します。
MICREX-SX、PROFIBUS-DP、PROFINET、EtherNet/IPに接続できる製品をご用意しています。
PROFIBUS-DP、PROFINET、EtherNet/IPのネットワーク定義ファイルはダウンロードページからダウンロードできます。
![]()
![]()
TC-net I/Oシステム対応 AB9
AB9は、東芝製ユニファイドコントローラnvシリーズのTC-net I/Oシステムに接続できるネットワーク接続型変換器です。アブソコーダ検出器と組み合わせることで、位置情報をバイナリコードで出力します。

形式選定
AB93[1]N
- [1]適用検出器
-
記号 検出器 2 VRE-P061/074/101 3 MRE-32SP061/074/101
MRE-G□SP061/074/1014 CYLNUC,Inrodsensor(IRS-51.2P) 5 VLS-8SM
システム構成


仕様
一般仕様
| 項目 | 仕様 | |
|---|---|---|
| 電源電圧 | TC-net I/O用 (SA911へ供給) |
DC24V(+10%, -15%) |
| 消費電流 | 0.1A以下(DC24V時) | |
| 電源電圧 | センサ,外部入力用 (BU902へ供給) |
DC24V(+10%, -15%) |
| 消費電流 | 0.2A以下(DC24V時) | |
| 許容瞬時停電時間 | 1ms以下 | |
| 耐電圧 | AC500V 60Hz 1分間[DC電源端子一括とアース間] | |
| 耐振動 | 5≦f<9Hz 片振幅3.1mm 9≦f<150Hz 定加速度9.8m/s2 |
|
| 使用周囲温度 | 0〜+55℃(氷結しないこと) | |
| 使用周囲湿度 | 10〜95%RH(結露しないこと) | |
| 汚染度 *1 | 2以下 | |
| 使用周囲雰囲気 | 腐食性ガスがないこと | |
| 保存周囲温度 | -40〜+70℃ | |
| 使用標高 *2 | 2000m以下 | |
| 接地 | D種接地(第3種接地) | |
| 構造 | 盤内蔵型 | |
| 外形寸法(mm) | 35(W)×185(H)×95(D) | |
| 質量 | 約0.4kg | |
- *1:その機器が使用される環境における導電性物質の発生度合いを示す指標です。
汚染度2 は、非導電性の汚染しか発生しません。
ただし、たまたまの凝結によって一時的な導電が起こりうる環境です。
*2:標高0m 付近で発生しうる大気圧以上に加圧した環境下では使用できません。故障する可能性があります。
性能仕様
| 項目 | 仕様 | |||||
|---|---|---|---|---|---|---|
| 形式 | AB932N | AB933N | ||||
| 適用検出器 | VRE-P061 VRE-P074 VRE-P101 |
MRE-32SP061 | MRE-G□SP061 MRE-32SP074 MRE-G□SP074 |
MRE-32SP101 MRE-G□SP101 |
||
| 位置検出方式 | アブソリュート位置検出 | |||||
| 分割数 | 8192分割×1回転 | 4096分割×32回転 〜 409.6分割×320回転 |
4096分割×32回転 〜 42.6分割×3072回転 |
|||
| 検出軸数 | 2 | |||||
| 絶縁方式 | フォトカプラ絶縁 (TC-net I/O回路 - センサ回路間) |
|||||
| 機能 | 位置データ検出機能,原点設定機能 | |||||
| 異常検知機能 | センサ未接続異常(SE),センサ用電源異常(PF),原点未設定(BOS) 保存メモリ異常(ME),CPUウォッチドックタイマ異常 |
|||||
| モジュール状態表示 | RUN(緑),ALM(赤),ER1(赤),ER2(赤),OSA1(緑),OSA2(緑) | |||||
| 設定値保存 | 不揮発性メモリ(FRAM) | |||||
| 位置データサンプリング時間 | 0.2ms | |||||
| 入出力チャネル数 | 入力4ワード,出力4ワード | |||||
| 外部接続 | BU902の端子台へ接続 | |||||
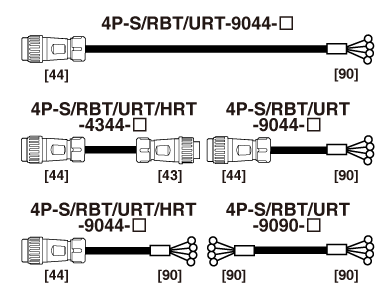
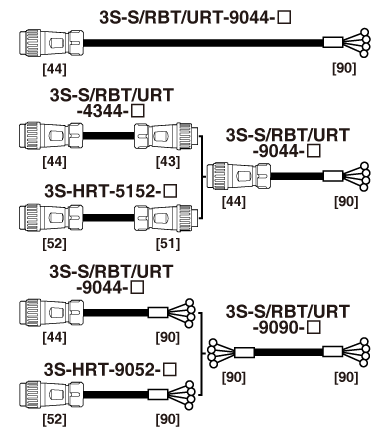
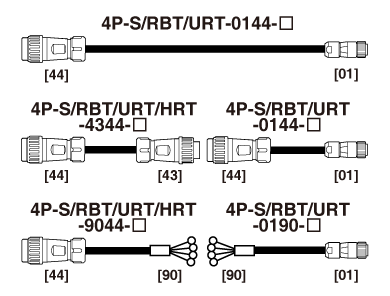
| 最大センサ ケーブル長 |
標準(S) | 500m | 200m | 300m | ||
| ロボット(RBT) | 250m | 100m | 150m | |||
| JKPEV-S (1.25mm2×5P) |
300m | 200m | 300m | |||
| 項目 | 仕様 | |||
|---|---|---|---|---|
| 形式 | AB934N | AB935N | ||
| 適用検出器 | CYLNUC | IRS-51.2 | VLS-8SM | |
| 位置検出方式 | セミアブソリュート位置検出 | |||
| 分解能 | 1.5625μm (12.8mm/8192分割) |
6.25μm (51.2mm/8192分割) |
1μm (8.192mm/8192分割) |
|
| 検出軸数 | 2 | |||
| 絶縁方式 | フォトカプラ絶縁 (TC-net I/O回路 - センサ回路間) |
|||
| 機能 | 位置データ検出機能,原点設定機能 | |||
| 異常検知機能 | センサ未接続異常(SE),センサ用電源異常(PF),原点未設定(BOS) 保存メモリ異常(ME),CPUウォッチドックタイマ異常 |
|||
| モジュール状態表示 | RUN(緑),ALM(赤),ER1(赤),ER2(赤),OSA1(緑),OSA2(緑) | |||
| 設定値保存 | 不揮発性メモリ(FRAM) | |||
| 位置データサンプリング時間 | 0.2ms | |||
| 入出力チャネル数 | 入力4ワード,出力4ワード | |||
| 外部接続 | BU902の端子台へ接続 | |||
| 最大センサ ケーブル長 |
標準(S) | 200m | 200m | |
| ロボット(RBT) | 100m | 100m | ||
| JKPEV-S (1.25mm2×5P) |
200m | - | ||
外部入力仕様
| 項目 | 仕様 | |
|---|---|---|
| 入力点数 | 3 点(原点設定:2,異常解除:1) | |
| 絶縁方式 | フォトカプラ絶縁 | |
| 定格入力電圧 | DC24V(+10%, -15%) | |
| 入力電圧範囲 | DC20.4~26.4V *3 | |
| 定格入力電流 | 5.2 mA | |
| ON電圧 | DC16.8V以上 | |
| OFF電圧 | DC6V以下 | |
| 応答時間 | OFF→ON | 0.04 ms |
| ON→OFF | 0.2 ms | |
- *3:外部入力用とセンサ用の電源は共通です。
外形図
MICREX-SX E-SXバス対応 NCV-220HFE
NCV-220HFEは、富士電機製MICREX-SシリーズのE-SXバスに接続できるネットワーク接続型変換器です。アブソコーダ検出器と組み合わせることで、位置情報をバイナリコードで出力します。

形式選定
NCV-220HFE[1]
- [1]適用検出器
-
記号 検出器 V1R VRE-P061/074/101 M2R MRE-32SP061/074/101
MRE-G□SP061/074/101
システム構成
仕様
一般仕様
| 項目 | 仕様 |
|---|---|
| 電源電圧 | DC24V±10%(リップルを含む) |
| 消費電力 | 7W以下 |
| 絶縁抵抗 | 20MΩ以上(DC500Vメガ)[DC電源端子一括とアース間] |
| 耐電圧 | AC500V 60Hz 1分間[DC電源端子一括とアース間] |
| 耐振動 | 片振幅:0.15mm,定加速度:19.6m/s2 各方向2時間 計6時間(IEC61131-2) *1 |
| 使用周囲温度 | 0〜+55℃(氷結しないこと) |
| 使用周囲湿度 | 20〜95%RH 結露しないこと (輸送時は5~95%RH 結露しないこと) |
| 使用周囲雰囲気 | 腐食性ガスがなく、塵埃がひどくないこと |
| 汚染度 | 2(IEC60664-1、IEC61131-2) *2 |
| 耐腐食性 | 有機溶剤の付着がないこと |
| 使用高度 | 標高2000m以下(輸送時の気圧は70kPa以上) |
| 保存周囲温度 | -25~+70℃ |
| 接地 | D種接地(第3種接地) |
| 構造 | 盤内蔵ブックシェルフ型、DINレール取付可能 |
| 冷却方法 | 自然冷却 |
| 外形寸法(mm) | 39(W)×155(H)×93(D) |
| 質量 | 約0.4kg |
- *1:本体を制御盤に固定ねじで取付けた時の状態です。
DIN レール取り付けの時は、振動や衝撃がないようにしてください。
繰返し・継続的な振動がある環境では、必ず振動対策を実施してください。
*2:汚染度2とは、「通常、導電性の汚染がない状態。しかし、場合によっては、結露で一時的な導電性が
発生し得る状態。(IEC61131-2)を意味します。
性能仕様
| 項目 | 仕様 | |||||
|---|---|---|---|---|---|---|
| 形式 | NCV-220HFEV1R | NCV-220HFEM2R | ||||
| 適用検出器 | VRE-P061 VRE-P074 VRE-P101 |
MRE-32SP061 | MRE-G□SP061 MRE-32SP074 MRE-G□SP074 |
MRE-32SP101 MRE-G□SP101 |
||
| 位置検出方式 | アブソリュート位置検出 | |||||
| 分割数 | 8192分割×1回転 | 4096分割×32回転 〜 409.6分割×320回転 |
4096分割×32回転 〜 42.6分割×3072回転 |
|||
| 検出軸数 | 2 | |||||
| 位置データ サンプリングタイム |
0.2ms | |||||
| パネル面操作機能 | 現在値設定、異常解除 | |||||
| スイッチ(製品裏面) | センサ(有効/無効)設定 位置データ増加方向(CW/CCW)設定 現在値設定(有効/無効) |
|||||
| モニタLED | 位置データ表示、電源状態表示、E-SXバス通信状態表示 現在値設定指示アンサバック表示、センサ未接続異常表示 |
|||||
| 最大センサ ケーブル長 |
標準(S) | 500m | 200m | 300m | ||
| ロボット(RBT) | 250m | 100m | 150m | |||
| JKPEV-S (1.25mm2×5P) |
300m | 200m | 300m | |||
通信仕様
| 項目 | 仕様 |
|---|---|
| 対応CPUモジュール | SPH3000MM |
| 通信方式 | E-SXバス通信(E-SXバス伝送仕様に準ずる) |
| 系統数 | IN、OUT 各1系統 |
| 伝送速度 | 100Mbps(E-SXバス伝送仕様に準ずる) |
| 接続コネクタ | E-SXバスコネクタ(RJ-45モジュラージャック) |
| 接続ケーブル | CAT5e STP クロスケーブル |
| 占有ワード数 | 入力6ワード、出力6ワード |
| 局番設定機能 | 有り(変換器パネル面のE-SXバスアドレス設定スイッチによる) |
外形図
PROFIBUS-DP対応 NCW-3DHPR
NCW-3DHPRはPROFIBUS-/DPに接続できる2軸タイプの変換器です。

形式選定
NCW-3DHPR[1]
- [1]適用検出器
-
記号 検出器 V1R VRE-P061/074/101 V2 VRE-16TS100 M2R MRE-32SP061/074/101
MRE-G□SP061/074/101LC CYLNUC,Inrodsensor(IRS-51.2P, IRS-32.8P) L8 VLS-8SM
システム構成
仕様
一般仕様
| 項目 | 仕様 |
|---|---|
| 電源電圧 | DC24V±10%(リップルを含む) |
| 消費電力 | 10W以下 |
| 絶縁抵抗 | 20MΩ以上(DC500Vメガ)[DC電源端子一括とアース間] |
| 耐電圧 | AC500V 60Hz 1分間[DC電源端子一括とアース間] |
| 耐振動 | 20m/s2 10〜500Hz・5分×10サイクル・3方向(JIS C0040に準拠) |
| 使用周囲温度 | 0〜+55℃(氷結しないこと) |
| 使用周囲湿度 | 20〜90%RH(結露しないこと) |
| 使用周囲雰囲気 | 腐食性ガスがなく、塵埃がひどくないこと |
| 保存周囲温度 | -25〜+70℃ |
| 接地 | D種接地(第3種接地) |
| 構造 | 盤内蔵ブックシェルフ型、DINレール取付可能 |
| 外形寸法(mm) | 39(W)×155(H)×93(D) |
| 質量 | 約0.4kg |
性能仕様
| 項目 | 仕様 |
|---|---|
| 形式 | NCW-3DHPRV1R, NCW-3DHPRV2, NCW-3DHPRM2R NCW-3DHPRLC, NCW-3DHPRL8 |
| 検出軸数 | 2 |
| 位置データ サンプリングタイム |
0.2ms |
| 異常検出 | PROFIBUS-DP 電源異常,センサ異常,メモリ異常,ウォッチドッグタイマ異常 |
| 付属機能 | プリセット機能 |
| モニタLED | PON:内部電源正常 |
| DTEX:PROFIBUS-DP データ更新中 | |
| RDY:変換器正常 | |
| PRE1/PRE2:プリセット動作(原点設定) | |
| ME:メモリ異常 | |
| SE1/SE2:センサ異常 | |
| 位置データ:D0~D23 | |
| プリセットデータ:D0~D23 | |
| 変換器診断データ | |
| パラメータデータ | |
| パネル面操作 | エラー解除:CLR |
| 原点設定:ZPS1/ZPS2 | |
| LED表示切換:DISP SEL | |
| PROFIBUS-DPのアドレス設定:NODE x16, x1 |
PROFIBUS-DP仕様
| 項目 | 仕様 |
|---|---|
| インターフェース | PROFIBUS-DP スレーブ(V0) |
| 通信速度 | 9.6kbps, 19.2kbps, 45.45kbps, 93.75kbps, 187.5kbps, 500kbps, 1.5Mbps, 3Mbps, 6Mbps, 12Mbps |
| 通信データ | 入力データ: 8Bytes/16Bytes, 出力データ: 8Bytes, アラームデータ: 8Bytes, パラメータデータ: 7Bytes |
アブソコーダ検出器の分割数・分解能・ケーブル長
VRE 1回転型
| 項目 | 仕様 | ||
|---|---|---|---|
| 形式 | NCW-3DHPRV1R | NCW-3DHPRV2 | |
| 適用検出器 | VRE-P061, VRE-P074, VRE-P101 | VRE-16TS100 | |
| 総回転回数 | 1 | ||
| 分割数 | 8192(213) | 65536(216) | |
| 位置検出方式 | アブソリュート方式 | ||
| 最大センサ
ケーブル長 |
標準(S) | 500m | 200m |
| ロボット(RBT) | 250m | 100m | |
| JKPEV-S (1.25mm2×5P) |
300m | - | |
MRE 多回転型
| 項目 | 仕様 | ||||||
|---|---|---|---|---|---|---|---|
| 形式 | NCW-3DHPRM2R | ||||||
| 適用検出器 | MRE-32SP061 | MRE-G□SP061 □:総回転回数 | |||||
| 総回転回数 | 32 | 64 | 128 | 160 | 256 | 320 | |
| 1回転分割数 | 4096 | 2048 | 1024 | 819.2 | 512 | 409.6 | |
| 総分割数 | 131072(217) | ||||||
| 位置検出方式 | アブソリュート方式 | ||||||
| 最大センサ ケーブル長 |
標準(S) | 200m | 300m | ||||
| ロボット(RBT) | 100m | 150m | |||||
| JKPEV-S (1.25mm2×5P) |
200m | 300m | |||||
| 項目 | 仕様 | ||||||
|---|---|---|---|---|---|---|---|
| 形式 | NCW-3DHPRM2R | ||||||
| 適用検出器 | MRE-32SP074 | MRE-G□SP074 □:総回転回数 | |||||
| 総回転回数 | 32 | 64 | 128 | 160 | 256 | 320 | |
| 1回転分割数 | 4096 | 2048 | 1024 | 819.2 | 512 | 409.6 | |
| 総分割数 | 131072(217) | ||||||
| 位置検出方式 | アブソリュート方式 | ||||||
| 最大センサ ケーブル長 |
標準(S) | 300m | |||||
| ロボット(RBT) | 150m | ||||||
| JKPEV-S (1.25mm2×5P) |
300m | ||||||
| 項目 | 仕様 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 形式 | NCW-3DHPRM2R | |||||||||||
| 適用検出器 | MRE-32SP101 | MRE-G□SP101 □:総回転回数 | ||||||||||
| 総回転回数 | 32 | 64 | 128 | 160 | 256 | 320 | 512 | 1280 | 2048 | 2560 | 3072 | |
| 1回転分割数 | 4096 | 2048 | 1024 | 819.2 | 512 | 409.6 | 256 | 102.4 | 64 | 51.2 | 42.6 | |
| 総分割数 | 131072(217) | |||||||||||
| 位置検出方式 | アブソリュート方式 | |||||||||||
| 最大センサ ケーブル長 |
標準(S) | 300m | ||||||||||
| ロボット(RBT) | 150m | |||||||||||
| JKPEV-S (1.25mm2×5P) |
300m | |||||||||||
CYLNUC アブソコーダ検出器一体型シリンダ
| 項目 | 仕様 | |
|---|---|---|
| 形式 | NCW-3DHPRLC | |
| 適用検出器 | CYLNUC | |
| アブソリュート検出範囲 | 12.8mm | |
| 分解能 | 1.5625μm | |
| 位置検出方式 | セミアブソリュート方式 | |
| 最大センサケーブル長 | 標準(S) | 200m |
| ロボット(RBT) | 100m | |
| JKPEV-S (1.25mm2×5P) |
200m | |
Inrodsensor シリンダ内蔵型アブソコーダ検出器
| 項目 | 仕様 | ||
|---|---|---|---|
| 形式 | NCW-3DHPRLC | ||
| 適用検出器 | IRS-51.2P | IRS-32.8P | |
| アブソリュート検出範囲 | 51.2mm | 32.768mm | |
| 分解能 | 6.25μm | 4μm | |
| 位置検出方式 | セミアブソリュート方式 | ||
| 最大センサケーブル長 | 標準(S) | 200m | |
| ロボット(RBT) | 100m | ||
| JKPEV-S (1.25mm2×5P) |
200m | ||
VLS 直線型
| 項目 | 仕様 | |
|---|---|---|
| 形式 | NCW-3DHPRL8 | |
| 適用検出器 | VLS-8SM | |
| アブソリュート検出範囲 | 8.192mm | |
| 分解能 | 1μm | |
| 位置検出方式 | セミアブソリュート方式 | |
| 最大センサケーブル長 | 標準(S) | 200m |
| ロボット(RBT) | 100m | |
| JKPEV-S (1.25mm2×5P) |
- | |
外形図
PROFINET対応 NCW-3DHPN
NCW-3DHPNはPROFINETに接続できる2軸タイプの変換器です。

形式選定
NCW-3DHPN[1]
- [1]適用検出器
-
記号 検出器 V1R VRE-P061/074/101 M2R MRE-32SP061/074/101
MRE-G□SP061/074/101LC CYLNUC,Inrodsensor(IRS-51.2P) L8 VLS-8SM
システム構成
仕様
一般仕様
| 項目 | 仕様 |
|---|---|
| 電源電圧 | DC24V±10%(リップルを含む) |
| 消費電力 | 10W以下 |
| 絶縁抵抗 | 20MΩ以上(DC500Vメガ)[DC電源端子一括とアース間] |
| 耐電圧 | AC500V 60Hz 1分間[DC電源端子一括とアース間] |
| 耐振動 | 20m/s2 10〜500Hz・5分×10サイクル・3方向(JIS C0040に準拠) |
| 使用周囲温度 | 0〜+55℃(氷結しないこと) |
| 使用周囲湿度 | 20〜90%RH(結露しないこと) |
| 使用周囲雰囲気 | 腐食性ガスがなく、塵埃がひどくないこと |
| 保存周囲温度 | -25〜+70℃ |
| 接地 | D種接地(第3種接地) |
| 構造 | 盤内蔵ブックシェルフ型、DINレール取付可能 |
| 外形寸法(mm) | 39(W)×155(H)×93(D) |
| 質量 | 約0.4kg |
性能仕様
| 項目 | 仕様 | |||||
|---|---|---|---|---|---|---|
| 形式 | NCW-3DHPNV1R | NCW-3DHPNM2R | ||||
| 適用検出器 | VRE-P061 VRE-P074 VRE-P101 |
MRE-32SP061 | MRE-G□SP061 MRE-32SP074 MRE-G□SP074 |
MRE-32SP101 MRE-G□SP101 |
||
| 位置検出方式 | アブソリュート位置検出 | |||||
| 分割数 | 8192分割×1回転 | 4096分割×32回転 〜 409.6分割×320回転 |
4096分割×32回転 〜 42.6分割×3072回転 |
|||
| 検出軸数 | 2 | |||||
| 位置データ サンプリングタイム |
2ms | |||||
| 設定値保存 | 不揮発性メモリ(FRAM) | |||||
| 最大センサ ケーブル長 |
標準(S) | 500m | 200m | 300m | ||
| ロボット(RBT) | 250m | 100m | 150m | |||
| JKPEV-S (1.25mm2×5P) |
300m | 200m | 300m | |||
| 項目 | 仕様 | ||||
|---|---|---|---|---|---|
| 形式 | NCW-3DHPNLC | NCW-3DHPNL8 | |||
| 適用検出器 | CYLNUC | IRS-51.2 | IRS-32.8 | VLS-8SM | |
| 位置検出方式 | セミアブソリュート位置検出 | ||||
| 分解能 | 1.5625μm (12.8mm/8192分割) |
6.25μm (51.2mm/8192分割) |
4μm (32.8mm/8192分割) |
1μm (8.192mm/8192分割) |
|
| 検出軸数 | 2 | ||||
| 位置データ サンプリングタイム |
2ms | ||||
| 設定値保存 | 不揮発性メモリ(FRAM) | ||||
| 最大センサ ケーブル長 |
標準(S) | 200m | 200m | ||
| ロボット(RBT) | 100m | 100m | |||
| JKPEV-S (1.25mm2×5P) |
200m | - | |||
| 項目 | 仕様 |
|---|---|
| 形式 | NCW-3DHPNV1R, NCW-3DHPNM2R, NCW-3DHPNLC, NCW-3DHPNL8 |
| 異常検出 | センサ異常,メモリ異常,ウォッチドッグタイマ異常,内部I/F 異常 |
| 付属機能 | プリセット機能 |
| モニタLED | MS:モジュールステータス |
| NS:ネットワークステータス | |
| L/A1/L/A2:通信状態 | |
| PON:内部電源正常 | |
| RDY:変換器正常 | |
| PR1/PR2:プリセット動作(現在値設定) | |
| ME:メモリ異常 | |
| SE1/SE2:センサ異常 | |
| 位置データ:D0~D23 | |
| プリセットデータ:D0~D23 | |
| 前回プリセットデータ:D0~D23 | |
| 変換器診断データ | |
| パラメータ | |
| 通信診断データ | |
| パネル面操作 | LED表示切換:DISP SEL |
通信仕様
| 項目 | 仕様 |
|---|---|
| 物理層 | Ethernet 100Base-TX、ISO/IEC 8802-3 |
| 通信ポート数 | 2(コネクタ:RJ45) |
| 通信速度 | Auto-Negotiation (100Mbit/s) |
| 通信方式 | Auto-Negotiation (Full Duplex) |
| 通信サイクルタイム(Update time) | 最小2ms |
| RT Class | RT Class 1 |
| コンフォーマンスクラス | Class B |
| PROFINET バージョン | PN2.3 |
| 基本プロトコル | Internet Protocol (IP version 4) (RFC 791) User Datagram Protocol (UDP) (RFC 768) Transfer Control Protocol (TCP) (RFC 793) Address Resolution Protocol(ARP) (RFC 826) Internet Control Message Protocol (ICMP) (RFC 792) Simple Network Management Protocol (SNMP)(RFC1157) Link Layer Discovery Protocol (LLDP)(IEEE802.1AB) Media Redundancy Protocol (MRP)(IEC 62439-2 |
| 推奨ケーブル | CAT-5e STP ストレートケーブル |
| ケーブル長 | ノード間:最大100m |
外形図
EtherNet/IP対応 NCW-3DHIP
NCW-3DHIPはEtherNet/IPに接続できる2軸タイプの変換器です。

形式選定
NCW-3DHIP[1]
- [1]適用検出器
-
記号 検出器 V1R VRE-P061/074/101 M2R MRE-32SP061/074/101
MRE-G□SP061/074/101LC CYLNUC,Inrodsensor(IRS-51.2P, IRS-32.8P)
システム構成
仕様
一般仕様
| 項目 | 仕様 |
|---|---|
| 電源電圧 | DC24V±10%(リップルを含む) |
| 消費電力 | 10W以下 |
| 絶縁抵抗 | 20MΩ以上(DC500Vメガ)[DC電源端子一括とアース間] |
| 耐電圧 | AC500V 60Hz 1分間[DC電源端子一括とアース間] |
| 耐振動 | 20m/s2 10〜500Hz・5分×10サイクル・3方向(JIS C0040に準拠) |
| 使用周囲温度 | 0〜+55℃(氷結しないこと) |
| 使用周囲湿度 | 20〜90%RH(結露しないこと) |
| 使用周囲雰囲気 | 腐食性ガスがなく、塵埃がひどくないこと |
| 保存周囲温度 | -25〜+70℃ |
| 接地 | D種接地(第3種接地) |
| 構造 | 盤内蔵ブックシェルフ型、DINレール取付可能 |
| 外形寸法(mm) | 39(W)×155(H)×93(D) |
| 質量 | 約0.4kg |
性能仕様
| 項目 | 仕様 | |||||
|---|---|---|---|---|---|---|
| 形式 | NCW-3DHIPV1R | NCW-3DHIPM2R | ||||
| 適用検出器 | VRE-P061 VRE-P074 VRE-P101 |
MRE-32SP061 | MRE-G□SP061 MRE-32SP074 MRE-G□SP074 |
MRE-32SP101 MRE-G□SP101 |
||
| 位置検出方式 | アブソリュート位置検出 | |||||
| 分割数 | 8192分割×1回転 | 4096分割×32回転 〜 409.6分割×320回転 |
4096分割×32回転 〜 42.6分割×3072回転 |
|||
| 検出軸数 | 2 | |||||
| 位置データ サンプリングタイム |
2ms | |||||
| 設定値保存 | 不揮発性メモリ(FRAM) | |||||
| 最大センサ ケーブル長 |
標準(S) | 500m | 200m | 300m | ||
| ロボット(RBT) | 250m | 100m | 150m | |||
| JKPEV-S (1.25mm2×5P) |
300m | 200m | 300m | |||
| 項目 | 仕様 | ||||
|---|---|---|---|---|---|
| 形式 | NCW-3DHIPLC | ||||
| 適用検出器 | CYLNUC | IRS-51.2 | IRS-32.8 | ||
| 位置検出方式 | セミアブソリュート位置検出 | ||||
| 分解能 | 1.5625μm (12.8mm/8192分割) |
6.25μm (51.2mm/8192分割) |
4μm (32.8mm/8192分割) |
||
| 検出軸数 | 2 | ||||
| 位置データ サンプリングタイム |
2ms | ||||
| 設定値保存 | 不揮発性メモリ(FRAM) | ||||
| 最大センサ ケーブル長 |
標準(S) | 200m | |||
| ロボット(RBT) | 100m | ||||
| JKPEV-S (1.25mm2×5P) |
200m | ||||
| 項目 | 仕様 |
|---|---|
| 形式 | NCW-3DHIPV1R, NCW-3DHIPM2R, NCW-3DHIPLC, NCW-3DHIPL8 |
| 異常検出 | センサ異常,メモリ異常,ウォッチドッグタイマ異常,内部I/F 異常 |
| 付属機能 | プリセット機能 |
| モニタLED | MS:モジュールステータス |
| NS:ネットワークステータス | |
| L/A1/L/A2:通信状態 | |
| PON:内部電源正常 | |
| RDY:変換器正常 | |
| PR1/PR2:プリセット動作(現在値設定) | |
| ME:メモリ異常 | |
| SE1/SE2:センサ異常 | |
| 位置データ:D0~D23 | |
| プリセットデータ:D0~D23 | |
| 前回プリセットデータ:D0~D23 | |
| センサコード | |
| 変換器診断データ | |
| パラメータ | |
| 通信診断データ | |
| パネル面操作 | LED表示切換:DISP SEL |
| IP アドレス設定(IP / NET):×1 IP アドレス設定(IP / ADR):×16、×1 |
|
| 背面操作 | LINK1/LINK2 通信設定(通信速度、通信方式) |
通信仕様
| 項目 | 仕様 |
|---|---|
| 物理層 | Ethernet 10Base-T,100Base-TX、ISO/IEC 8802-3 |
| 通信ポート数 | 2(コネクタ:RJ45) |
| 通信速度(選択可) | 100Mbit/s , 10Mbit/s , Auto-Negotiation |
| 通信方式(選択可) | Full Duplex , Half Duplex , Auto-Negotiation |
| 通信サイクルタイム(RPI) | 最小2ms |
| プロトコル | CIP Conformance Test CT-15 |
| 基本プロトコル | Internet Protocol(IP version 4) (RFC 791) User Datagram Protocol(UDP) (RFC 768) Transfer Control Protocol(TCP) (RFC 793) Address Resolution Protocol(ARP) (RFC 826) Internet Control Message Protocol (ICMP) (RFC 792) Bootstrap Protocol(BOOTP)(RFC951) Dynamic Host Configuration Protocol(DHCP)(RFC2131) |
| 対応ネットワークトポロジー | スター型 リニアバス型 リング型(DLR機能) |
| DLR機能 | ー |
| Webサーバ機能 | ー |
| 推奨ケーブル | CAT-5e STP ストレートケーブル |
| ケーブル長 | ノード間:最大100m |
外形図
アプリケーションのご紹介