耐環境型 多回転型アブソコーダ検出器 MRE®
製品概要

多回転型アブソコーダ検出器 MREは、軸が回転した量と回転した回数を検出する回転型エンコーダの検出部です。変換器またはコントローラと組み合わせることで、1回転以上の回転量をアブソリュート方式で検出します。
耐環境型は、特に環境の悪い場所での使用を想定しているアブソコーダ検出器です。
![]()
形式選定

| ①検出器形式 | ②回転回数 | ③形状 | ④検出器 種類 |
⑤取付方式 | ⑥軸先端 形状 |
⑦ケーブル 端末処理 |
⑧ケーブル 引き出し長 |
⑨シリコン オイル封入 |
|---|---|---|---|---|---|---|---|---|
| MRE | 32 | S | P061 | F | K | B | - | - |
| 32 | S | P074 | F | K | B | 2 | -G | |
| 32 | S | P101 | F | K | B | 2 | -G | |
| 1024 | S | 16TS100 | F | K | P | 2 | -G |
![]() の記号は選択可能です。
の記号は選択可能です。
詳細
- ①検出器形式
- MRE[多回転型]
- ②回転回数
-
SP061, SP074 SP101 1024S16TS100 32:32回転
G64:64回転
G128:128回転
G160:160回転
G256:256回転
G320:320回転32:32回転
G64:64回転
G128:128回転
G160:160回転
G256:256回転
G320:320回転
G512:512回転
G1280:1280回転
G2048:2048回転
G2560:2560回転
G3072:3072回転1024:1024回転
- ③形状
- S[長円筒形]
- ④検出器種類
- P[標準] 16TS[高分解能]
- ⑤取付方式
- F[フランジ型] L[据置型] M[フェース型 (074のみ)]
- ⑥軸先端形状
- K[両丸型キー]
- ⑦ケーブル端末処理
-
- B[標準コネクタ(七星:NJW-2012-PM□)NSD標準ケーブル対応]
- R[圧着端子(R1.25-4)市販、NSD標準ケーブル対応]
- P[大型コネクタ(七星:NWPC-4012-Ad12)市販ケーブル(JKPEV-S)対応]
(MRE-1024S16TS100の場合のみ選択可)
- ⑧ケーブル引き出し長
- 2[2m] 5[5m] 10[10m] 15[15m] 20[20m]
MRE-□SP061は2mのみ - ⑨シリコンオイル封入
- G[シリコンオイル封入] なし[オイル封入なし]
- "G-"仕様は減速機として歯車を組み込んでいますので、若干のバックラッシュがあります。
![取付方式:F[フランジ型]L[据置型]M[フェース型]、軸先端形状:K[両丸型キー]、ケーブル端末処理:B[標準コネクタ]R[圧着端子]P[大型コネクタ]](images/image02a.gif)
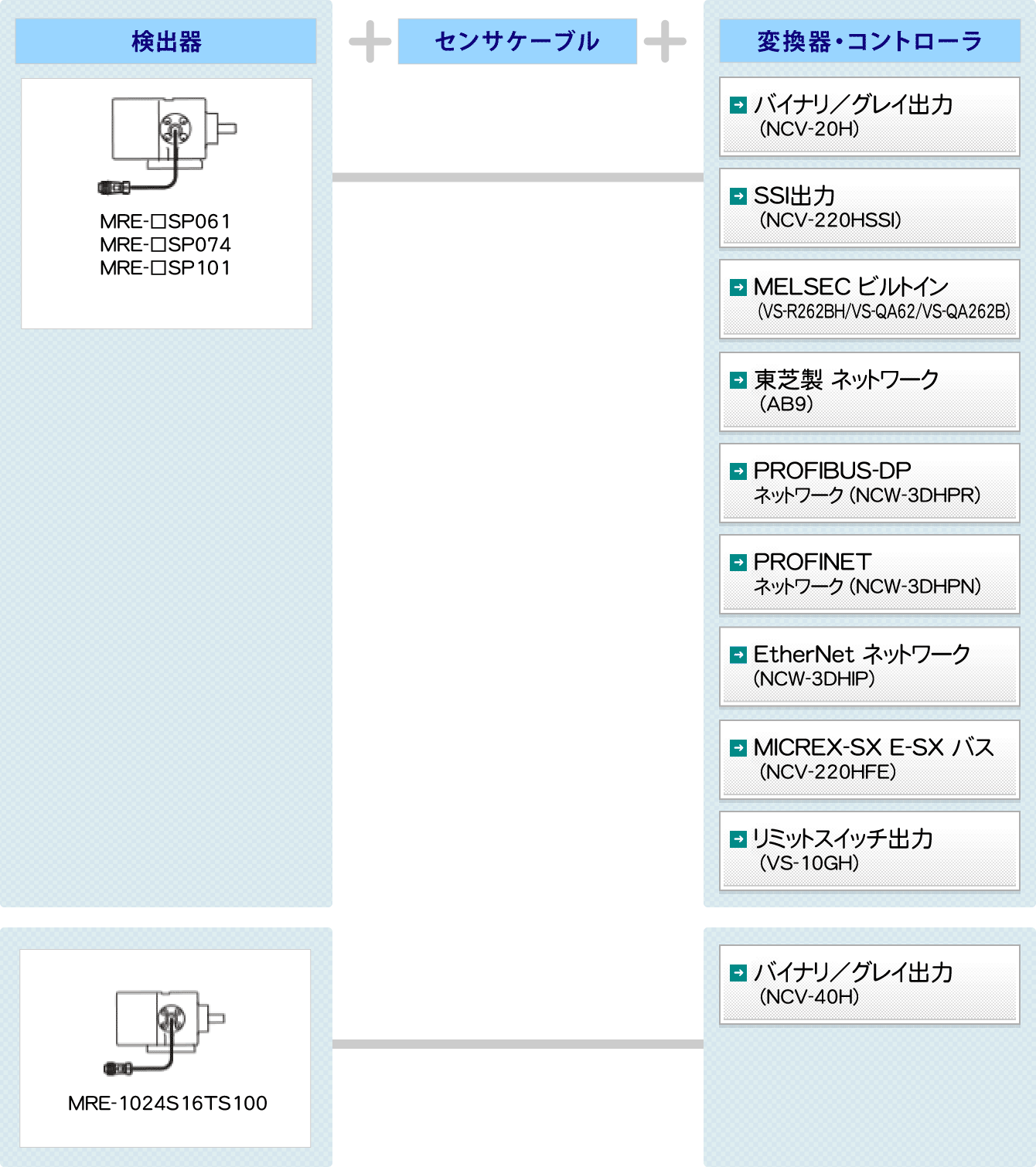
システム構成
仕様
| 項目 | 仕様 | ||||||
|---|---|---|---|---|---|---|---|
| 検出器形式 | MRE-□SP061 | ||||||
| 総回転回数 | 32 | G64 | G128 | G160 | G256 | G320 | |
| 1回転分割数 | 2048 | 1024 | 512 | 409.6 | 256 | 204.8 | |
| 総分割数 | 65536(216) (NCV-20HBNM2R) |
||||||
| 質量(kg) | 1.5 | 1.0 | |||||
| 直線性誤差(°degree) | 0.7 Max. | 1.4 Max. | 2.8 Max. | 3.5 Max. | 5.6 Max. | 7.0 Max. | |
| 慣性モーメント | kg・m2 {kgf・cm・s2} | 6.7×10-6{6.8×10-5} | 3.9×10-6{4.0×10-5} | ||||
| 起動トルク | N・m{kgf・cm} | 4.9×10-2 {0.5} 以下 | |||||
| 軸許容荷重 | ラジアル(N {kgf}) | 98{10} | |||||
| スラスト(N {kgf}) | 49{5} | ||||||
| 機械的許容回転速度(r/min) | 2000 | 3600 | |||||
| 軸受寿命(h) | 4.5×104(2000r/minにて) | 1.5×104(3600r/minにて) | |||||
| 周囲温度 | 使用時(℃) | -20〜+80 | |||||
| 保存時(℃) | -30〜+90 | ||||||
| 耐振動 | 2.0×102m/s2 {20G} 200Hz 上下4h 前後2h(JIS D1601) | 98m/s2 {10G} 200Hz 上下4h 前後2h(JIS D1601) |
|||||
| 耐衝撃 | 4.9×103m/s2 {500G} 0.5ms 上下前後各3回(JIS C5026) | 2.9×103m/s2 {300G} 0.5ms 上下前後各3回(JIS C5026) |
|||||
| 保護構造 | IP65(JEM1030) | ||||||
| 最大センサ ケーブル長 |
標準ケーブル(m) | 200(4P-S) | 300(4P-S) | ||||
| ロボットケーブル(m) | 100(4P-RBT) | 150(4P-RBT) | |||||
| JKPEV-Sケーブル(m) | 200(1.25mm2×5P) | 300(1.25mm2×5P) | |||||
| 引き出しセンサケーブル長(m) | 2 | ||||||
| 項目 | 仕様 | ||||||
|---|---|---|---|---|---|---|---|
| 検出器形式 | MRE-□SP074 | ||||||
| 総回転回数 | 32 | G64 | G128 | G160 | G256 | G320 | |
| 1回転分割数 | 2048 | 1024 | 512 | 409.6 | 256 | 204.8 | |
| 総分割数 | 65536(216) (NCV-20HBNM2R) |
||||||
| 質量(kg) | 5.5+0.1×ケーブル長(m) | ||||||
| 直線性誤差(°degree) | 0.6 Max. | 1.2 Max. | 2.4 Max. | 3.0 Max. | 4.8 Max. | 6.0 Max. | |
| 慣性モーメント | kg・m2 {kgf・cm・s2} | 3.3×10-5{3.4×10-4} | |||||
| 起動トルク | N・m{kgf・cm} | 9.8×10-2 {1} 以下 | |||||
| 軸許容荷重 | ラジアル(N {kgf}) | 98{10} | |||||
| スラスト(N {kgf}) | 49{5} | ||||||
| 機械的許容回転速度(r/min) | 4000 | ||||||
| 軸受寿命(h) | 8×104(4000r/minにて) | ||||||
| 周囲温度 | 使用時(℃) | -20〜+120 | |||||
| 保存時(℃) | -30〜+120 | ||||||
| 耐振動 | 2.0×102m/s2 {20G} 200Hz 上下4h 前後2h(JIS D1601) | ||||||
| 耐衝撃 | 4.9×103m/s2 {500G} 0.5ms 上下前後各3回(JIS C5026) | ||||||
| 保護構造 | IP67(JEM1030) IP69K(ISO20653) |
||||||
| 最大センサ ケーブル長 |
標準ケーブル(m) | 300(4P-S) | |||||
| ロボットケーブル(m) | 150(4P-RBT) | ||||||
| JKPEV-Sケーブル(m) | 300(1.25mm2×5P) | ||||||
| 引き出しセンサケーブル長(m) | 2, 5, 10, 15, 20 | ||||||
| 項目 | 仕様 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 検出器形式 | MRE-□SP101 | |||||||||||
| 総回転回数 | 32 | G64 | G128 | G160 | G256 | G320 | G512 | G1280 | G2048 | G2560 | G3072 | |
| 1回転分割数 | 2048 | 1024 | 512 | 409.6 | 256 | 204.8 | 128 | 51.2 | 32 | 25.6 | 21.3 | |
| 総分割数 | 65536(216) (NCV-20HBNM2R) |
|||||||||||
| 質量(kg) | 7+0.1×ケーブル長(m) | |||||||||||
| 直線性誤差(°degree) | 0.6 Max. | 1.2 Max. | 2.4 Max. | 3.0 Max. | 4.8 Max. | 6.0 Max. | 9.6 Max. | 24 Max. | 38.4 Max. | 48 Max. | 56 Max. | |
| 慣性 モーメント |
kg・m2 {kgf・cm・s2} |
3.3×10-5{3.4×10-4} | ||||||||||
| 起動トルク | N・m {kgf・cm} |
9.8×10-2 {1} 以下 | ||||||||||
| 軸許容荷重 | ラジアル (N {kgf}) |
1.5×102{15} | ||||||||||
| スラスト (N {kgf}) |
78{8} | |||||||||||
| 機械的許容回転速度(r/min) | 4000 | |||||||||||
| 軸受寿命(h) | 8×104(4000r/minにて) | |||||||||||
| 周囲温度 | 使用時(℃) | -20〜+120 | ||||||||||
| 保存時(℃) | -30〜+120 | |||||||||||
| 耐振動 | 2.0×102m/s2 {20G} 200Hz 上下4h 前後2h(JIS D1601) | |||||||||||
| 耐衝撃 | 4.9×103m/s2 {500G} 0.5ms 上下前後各3回(JIS C5026) | |||||||||||
| 保護構造 | IP67(JEM1030) IP69K(ISO20653) |
|||||||||||
| 最大センサ ケーブル長 |
標準 ケーブル(m) |
300(4P-S) | ||||||||||
| ロボット ケーブル(m) |
150(4P-RBT) | |||||||||||
| JKPEV-S ケーブル(m) |
300 (1.25mm2×5P) | |||||||||||
| 引き出しセンサケーブル長(m) | 2, 5, 10, 15, 20 | |||||||||||
分割数について
検出器の分割数は組み合わせる変換器またはコントローラにより異なります。使用する変換器またはコントローラの仕様書でご確認ください。
| 項目 | 仕様 | |
|---|---|---|
| 検出器形式 | MRE-1024S16TS100 | |
| 総回転回数 | 1024 | |
| 1回転分割数 | 65536 | |
| 総分割数 | 67108864(226) (NCV-40H) |
|
| 質量(kg) | 8+0.2×ケーブル長(m) | |
| 直線性誤差(°degree) | 0.084 Max. | |
| 慣性モーメント | kg・m2 {kgf・cm・s2} | 4.1×10-5 {4.2×10-4} |
| 起動トルク | N・m{kgf・cm} | 9.8×10-2 {1}以下 |
| 軸許容荷重 | ラジアル(N {kgf}) | 1.5×102{15} |
| スラスト(N {kgf}) | 78 {8} | |
| 機械的許容回転速度(r/min) | 4000 | |
| 軸受寿命(h) | 8×104(4000r/minにて) | |
| 周囲温度 | 使用時(℃) | -20〜+120 |
| 保存時(℃) | -30〜+120 | |
| 耐振動 | 2.0×102m/s2{20G} 200Hz 上下4h 前後2h(JIS D1601) | |
| 耐衝撃 | 4.9×103m/s2 {500G} 0.5ms 上下前後各3回(JIS C5026) | |
| 保護構造 | IP67(JEM1030) IP69K(ISO20653) |
|
| 最大センサ ケーブル長 |
標準ケーブル(m) | 300(5S-SLA) |
| ロボットケーブル(m) | 100(5S-RBT) | |
| 引き出しセンサケーブル長(m) | 2, 5, 10, 15, 20 | |
分割数について
検出器の分割数は組み合わせる変換器またはコントローラにより異なります。使用する変換器またはコントローラの仕様書でご確認ください。
外形図
標準タイプ
 MRE-32SP061
MRE-32SP061
MRE-G□SP061- MRE-□SP074
- MRE-□SP101
高分解能タイプ
- MRE-1024S16TS100
アプリケーションのご紹介